|
. построить графики изменения фазовых координат системы во времени при переходе системы из начального состояния в конечное за минимальное время;
. построить графики изменения оптимального управления во времени, обеспечивающего минимальное время перехода из исходного состояния в конечное;
. построить графики изменения фазовых координат системы во времени при переходе системы из исходного состояния системы в конечное;
. построить графики изменения неоптимального управляющего воздействия.
.3 Решение задачи принципом максимума
 (6.7) (6.7)
В данной задаче:
 (6.8) (6.8)
С учетом конкретного математического описания системы (6.3) и (6.4) функция Гамильтона принимает вид:
 (6.9) (6.9)
Система дифференциальных уравнений, сопряженных системе (6.3) и (6.4) имеет вид:
 (6.10) (6.10)
 (6.11) (6.11)
Согласно принципу максимума при оптимальном управлении функция Гамильтона (9) принимает максимальное значение. Следовательно, для поиска оптимального управления Uопт(t), нужно максимизировать функцию Гамильтона:
 (6.12) (6.12)
Так как функция Гамильтона (6.9) линейно зависит от управления U(t), то оптимальное управление будет принимать значения: Uопт(t)=-1, если множитель при U(t) в (6.9) имеет знак «-»; и Uопт(t)=1, если множитель при U(t) в (6.9) имеет знак «+», т.е.: Uопт(t)=signΨ2(t), где signΨ2(t) - знаковая функция.
В соответствии с алгоритмом решения задачи принципом максимума найденное выражение оптимального управления подставляют в систему сопряженных уравнений (6.3), (6.4), (6.10), (6.11).
Решение этой системы при заданных граничных условиях (6.5а), (6.5б), (6.5в) и (6.5г) можно получить в фазовом пространстве
 (6.14) (6.14)
или во временной области
 (6.15) (6.15)
 (6.16) (6.16)
При решении системы уравнений (6.3), (6.4), (6.10), (6.11) в фазовом пространстве оптимальное управление является функцией фазовых координат. При решении системы уравнений (6.3), (6.4), (6.10), (6.11) во временной области оптимальное управление является функцией времени. Покажем это: рассмотрим систему уравнений (6.10) и (6.11).
Из (6.10) следует:
 (6.17) (6.17)
Подставим (6.17) в (6.11):
 (6.18) (6.18)
и проинтегрируем (6.18)
 (6.19) (6.19)
Заметим, что функция (6.19) линейна. Следовательно, Ψ2(t) только один раз может сменить знак (рис. 1).


Рис. 1. Графики функций Ψ2(t) и Uопт(t)
В соответствии с (6.13) оптимальное управление тоже только один раз меняет знак и может переключаться со значения (-1) на (+1) или со значения (+1) на (-1).
.4 Построение фазовых траекторий.
Построим фазовые траектории движения системы для случая Uопт(t)=+1. При этом система уравнений (3) и (4) описывающая рассматриваемую систему, примет вид:
 (6.20) (6.20)
 (6.21) (6.21)
Поделим (6.20) на (6.21):
 (6.22) (6.22)
и проинтегрируем (6.22):
 (6.23) (6.23)
 (6.24) (6.24)
Уравнение (6.24) описывает движение системы в фазовом пространстве при U(t)=1. Графики функции (6.24) для различных y0 приведены на рис.2. Они представляют собой параболы с ветвями симметричными относительно оси y1(t), и вершинами слева.
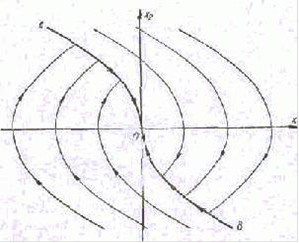
Рис. 2. Графики движения системы в фазовом пространстве в зависимости от начальных условий и функции управления.
|
 На каком основании людей избирают лидерами, либо позволяют им становиться таковыми? Для объяснения этого явления был разработан ряд теорий, однако последние исследования сосредоточены на так называемых имплицитных теориях лидерства.
На каком основании людей избирают лидерами, либо позволяют им становиться таковыми? Для объяснения этого явления был разработан ряд теорий, однако последние исследования сосредоточены на так называемых имплицитных теориях лидерства. Для успешной работы фирмы на рынке необходимо не только определиться с целями, но и понять, как их можно достичь. Для этого надо очень хорошо изучить своего потребителя, а может, даже и создать новый тип потребителя.
Для успешной работы фирмы на рынке необходимо не только определиться с целями, но и понять, как их можно достичь. Для этого надо очень хорошо изучить своего потребителя, а может, даже и создать новый тип потребителя. Прежде всего менеджеру необходимо определить какой вид карьеры он предпочитает. Это и определит его стратегию. Если он менеджер знает, какое положение хочет занять через пять или даже десять лет, то можно определить направление действий и составить задачи, которых необходимо достичь.
Прежде всего менеджеру необходимо определить какой вид карьеры он предпочитает. Это и определит его стратегию. Если он менеджер знает, какое положение хочет занять через пять или даже десять лет, то можно определить направление действий и составить задачи, которых необходимо достичь.